“多智能体协作指南:五种主流模式怎么选、怎么用?”
在之前的一篇文章中,我们探讨了多智能体 (Multi-agent) 系统何时能发挥最大价值,以及什么时候只用单个智能体 (Agent) 其实更好。这篇文章则是为那些已经决定采用“多智能体”路线的团队准备的:面对手头的问题,到底该选哪种协作模式?
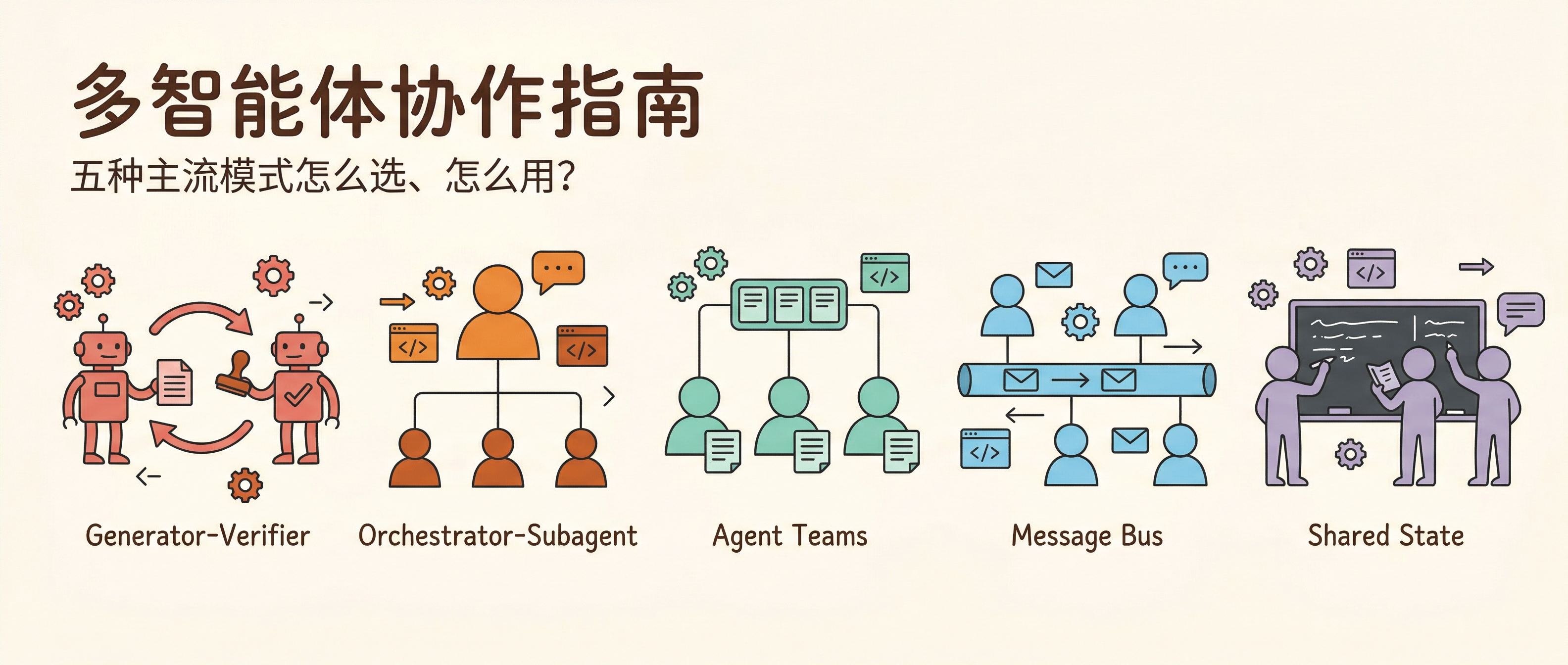
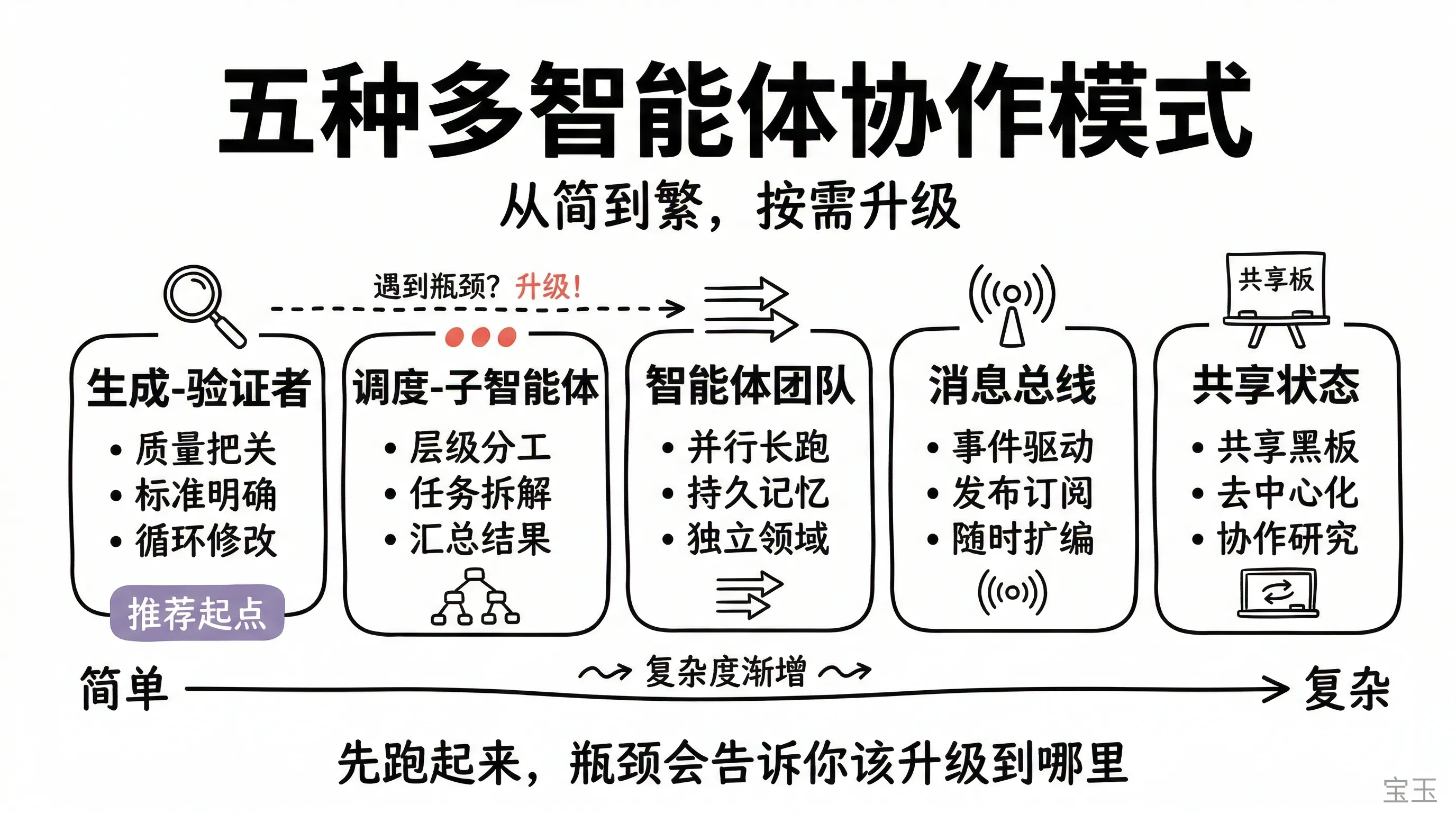
我们常常看到,有些团队在挑选模式时,只顾着选听起来“高大上”的,却忽略了到底适不适合手头的问题。我们的建议是:从最简单的、能跑通的模式开始,观察它在哪里会遇到瓶颈,然后再逐步升级。 今天这篇文章,我们就来拆解五种常见模式的运作原理和局限性:
- 生成 - 验证者 (Generator-verifier):适用于看重输出质量、且有明确评估标准的场景。
- 调度 - 子智能体 (Orchestrator-subagent):适用于任务拆解清晰、子任务边界分明的场景。
- 智能体团队 (Agent teams):适用于可以并行处理、互不干扰且需要长时间运行的子任务。
- 消息总线 (Message bus):适用于事件驱动的流水线作业,以及系统还在不断扩展新智能体的场景。
- 共享状态 (Shared-state):适用于需要高度协作、智能体之间需要互相参考别人发现的场景。
模式一:生成 - 验证者 (Generator-verifier)
这是最简单的多智能体模式,也是目前落地应用最广泛的模式之一。在我们之前的文章中,曾将其称为“验证子智能体模式”,这里我们使用更宽泛的“生成 - 验证者”来称呼它,因为这里的“生成者”不一定非得是个指挥全局的调度者。
它是如何运作的
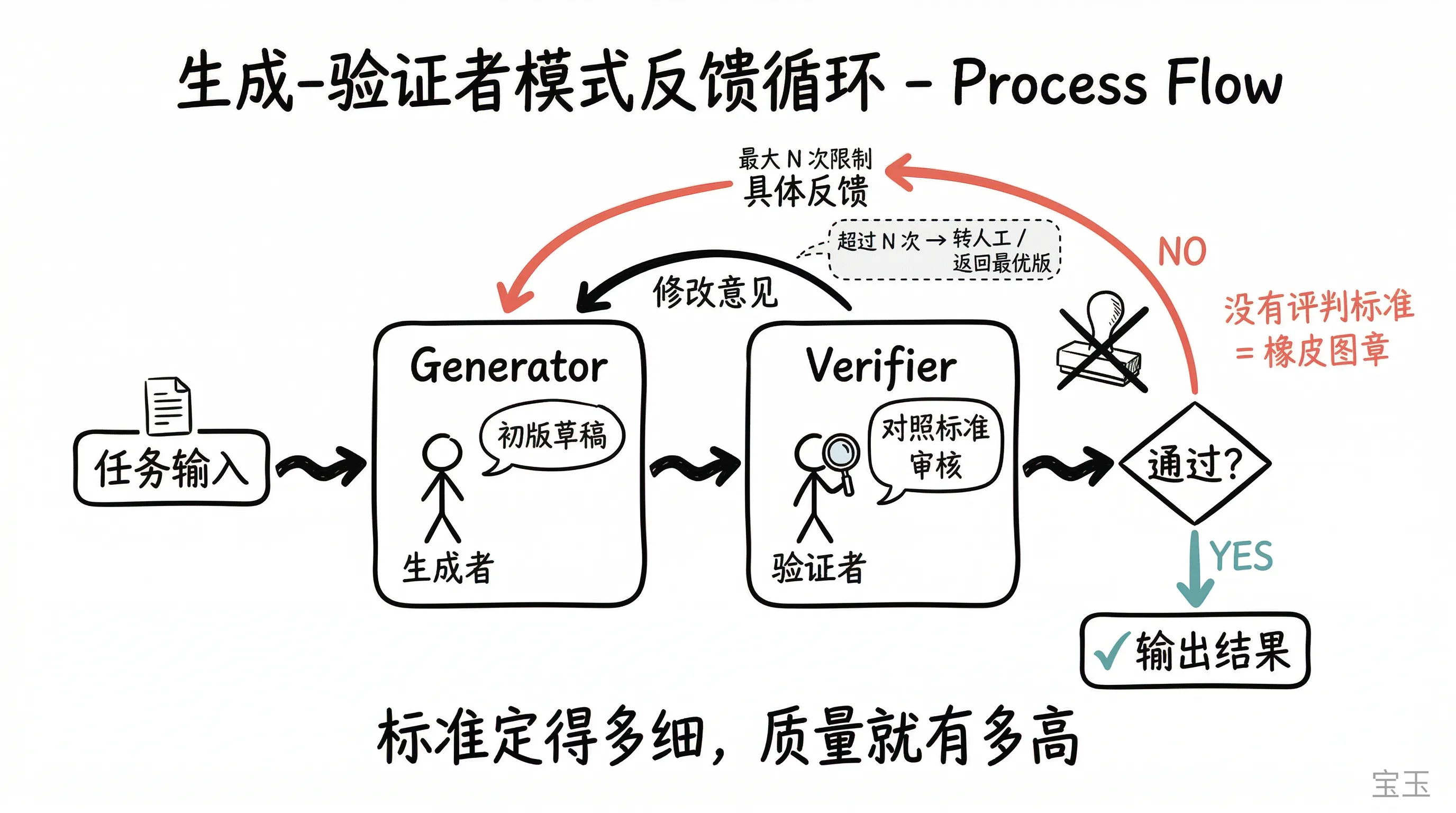
生成者 (Generator) 接到一个任务后,会先给出一版初步结果,然后把它传给验证者 (Verifier) 去评估。验证者会检查这个结果是否符合规定的标准。如果符合,就盖章通过;如果不符合,验证者会把具体的修改意见(反馈)打回去。生成者拿着这些反馈再重新修改一版。这个“修改 - 审核”的循环会一直进行,直到验证者满意,或者达到了系统设定的最大修改次数限制。
它在何时最好用
想象一个用来回复客户工单的自动邮件系统。生成者利用产品文档和工单详情写出一封初稿。验证者则充当“质检员”:核对知识库看事实准不准、检查语气符不符合品牌要求、确认客户提到的每个问题是不是都回答了。如果检查没通过,验证者会把具体问题甩回给生成者,比如指出“把某个功能错误地归到了低配版里”或者“漏答了某个问题”。
当输出质量至关重要,而且你能把“什么是好结果”用明确的标准写出来时,用这个模式准没错。它非常适合代码生成(一个智能体写代码,另一个写测试并运行)、事实核查、按固定评分表打分、合规性审查,以及任何“一次错误的代价远大于多跑一圈修改流程”的领域。
它的局限性在哪
这个系统的下限,完全取决于验证者的审核标准有多细。(注:如果你只告诉验证者“帮我看看这东西好不好”,却不给它具体的条条框框,它往往就会变成一个闭着眼睛盖“合格”章的橡皮图章。) 团队在应用这个模式时最常犯的错误,就是建好了循环机制,却没定义清楚“验证”到底意味着什么,这只会营造出一种“我们在做质量控制”的虚假繁荣。
另外,这种模式假设“生成”和“验证”是两种可以拆开的技能。但如果你要评估的是一个绝妙的创意,评估它的难度可能和想出它一样高,这时候验证者往往就不太靠谱了。
最后,这种循环很容易陷入“死胡同”。如果生成者就是无法解决验证者提出的问题,系统就会在两者之间来回踢皮球,永远无法收敛。因此,必须设置一个最大循环次数限制,并准备好后备方案(比如转交人工,或者带着提示说明返回当前最好的一版),防止它变成死循环。
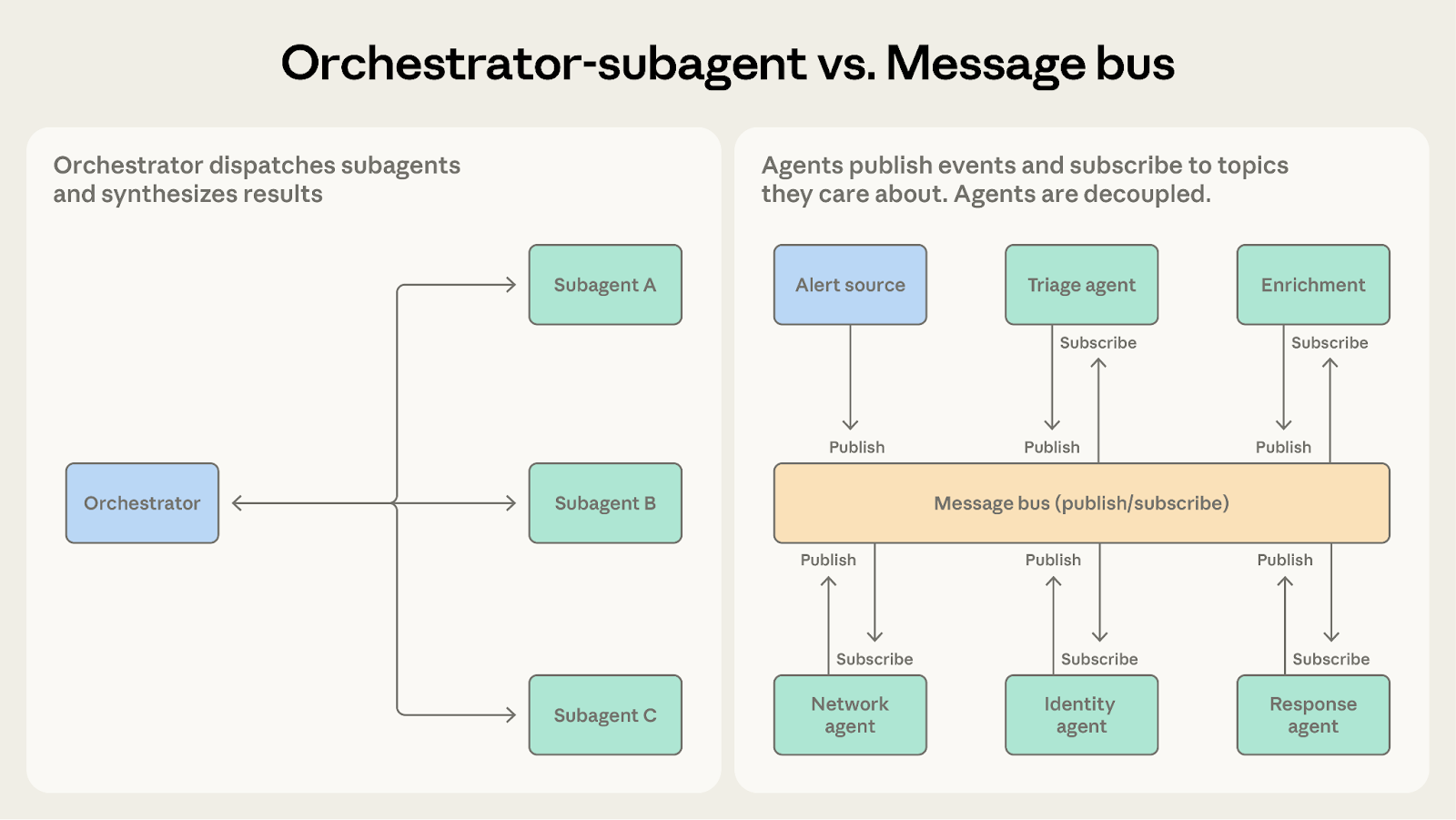
模式二:调度 - 子智能体 (Orchestrator-subagent)
这个模式的核心在于“层级制”。有一个像“团队主管”一样的核心智能体负责规划工作、分发任务,并最终汇总结果;而各个子智能体 (Subagents) 则负责处理具体的分摊工作,做完后向上级汇报。
它是如何运作的
主导的调度者 (Orchestrator) 收到任务后,会先思考该怎么动手。它可以自己解决一部分,把剩下的指派给不同的子智能体。等小弟们把活干完、交上结果后,调度者再把这些碎片拼成一份完整的最终答案。
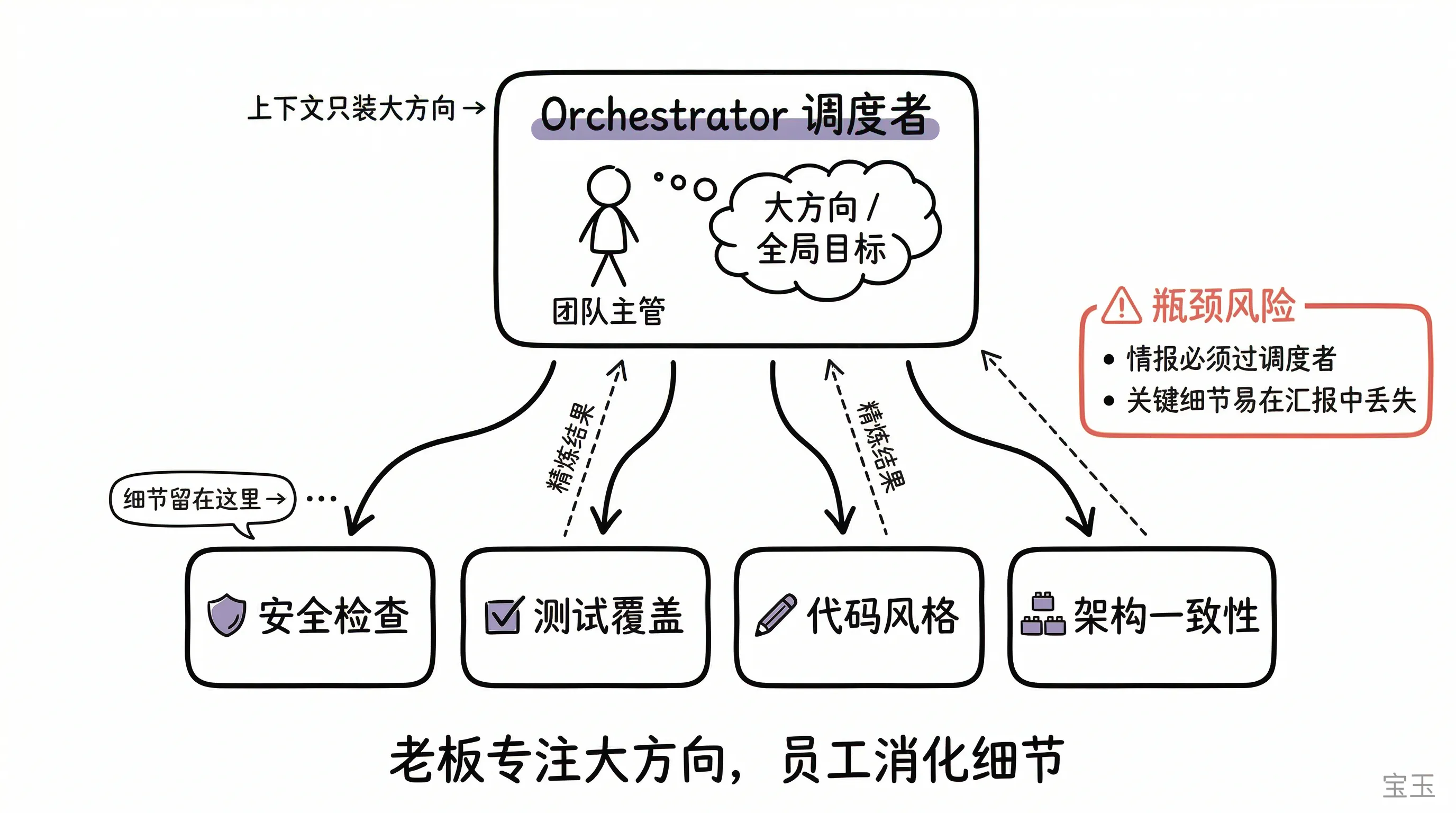
Claude Code 用的就是这种模式。主智能体自己负责写代码、改文件、跑命令,但当它需要在庞大的代码库里大范围搜索,或者需要调查一些独立问题时,它就会在后台派发给子智能体。这样主线工作不会停,搜索结果也会源源不断地送回来。每个子智能体都在自己独立的上下文窗口 (Context window) 里工作,只返回精炼后的调查结果。(注:这就好比老板的脑子(上下文)只需专注于大方向,而查资料等繁杂信息都在员工的大脑里消化,从而保证老板的思路不被琐事塞满。)
它在何时最好用
想想一个自动化的代码审查 (Code review) 系统。当有人提交了新代码,系统需要检查安全漏洞、验证测试覆盖率、评估代码风格、并检查架构一致性。这几个检查方向互不干涉,需要的背景知识也不同,并且都能产出清晰的报告。此时,调度者就可以把任务分发给几个专门的子智能体,等它们查完,再把报告融合成一份全面的审查意见。
当任务拆解非常明确,且子任务之间互相没啥依赖时,这个模式非常得心应手。调度者能时刻保持对大目标的掌控,而子智能体则心无旁骛地干好自己的细分工作。
它的局限性在哪
调度者很容易变成信息的“瓶颈”。一旦某个子智能体发现了可能影响另一个子智能体工作的信息,这个情报必须先上报给调度者,再由调度者下发。比如,查安全的智能体发现了一个认证漏洞,这个漏洞恰好会影响查架构的智能体的分析。如果信息在上下级之间倒手太多次,关键细节很容易就在被一次次“总结汇报”的过程中弄丢了。
另外,如果不做专门的并行处理,子智能体会按顺序一个个干活。这意味着你要花着多智能体处理数据(Token)的钱,却享受不到“人多干活快”的速度优势。
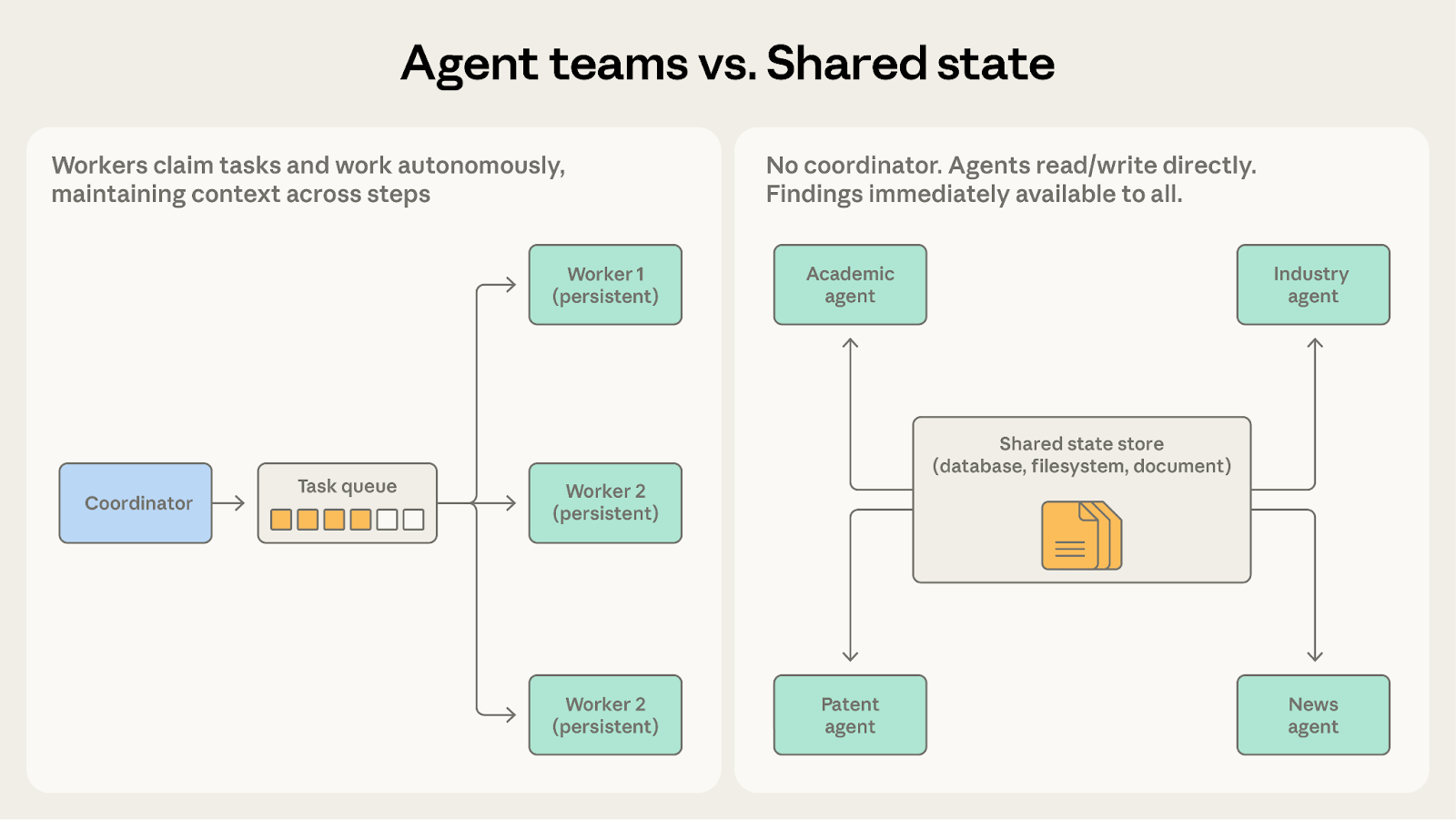
模式三:智能体团队 (Agent teams)
当一份大工作可以被拆成多个并行的子任务,而且这些任务需要花很长时间独立完成时,“组长派活”的层级制就会显得太死板了。
它是如何运作的
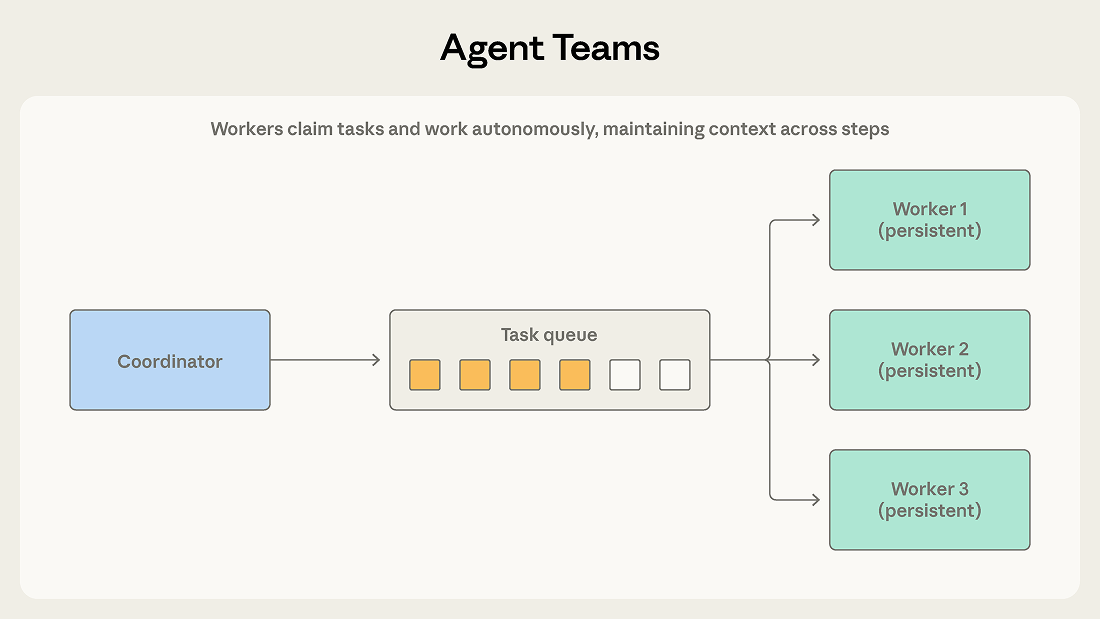
一个协调者 (Coordinator) 会创建出多个作为独立进程运行的团队成员 (Teammates)。这些成员会从一个共享的任务队列里自己“抢单”,接单后自主完成多步操作,干完再举手示意。
它和“调度 - 子智能体”最大的区别在于成员的持久性。调度者通常是为了一件小事临时叫出一个子智能体,干完就解散。但在团队模式里,成员们是长期存在的,它们在接手一个个任务的过程中,会不断积累领域知识和上下文,越干越熟练。协调者只管派活和收作业,并不会在每次任务结束后把它们的记忆清空。
它在何时最好用
假设你要把一个庞大的代码库从一个框架迁移到另一个框架。每个团队成员都可以独立负责迁移其中一个服务模块,自己处理依赖项、改代码、修测试 bug、做验证。协调者把一个个模块分给成员,成员们自主完成这一整套迁移流程。最后协调者把所有迁移好的模块攒在一起,跑一遍系统级的集成测试。
当子任务相互独立,且需要跨越多步、长时间处理时,用这个模式最爽。因为每个成员都在不断积累自己那个小领域的经验,而不是每次接活都像个失忆的新手。
它的局限性在哪
“独立”是这个模式的生命线,也是软肋。不像调度模式里有个组长帮忙传话,团队成员们都是闷头干活的,彼此之间很难共享中间进度。如果 A 的工作会影响到 B,他们俩却毫不知情,最后交上来的结果可能就打架了。
进度管理也是个让人头疼的问题。因为大家干活的时间长短不一,有的两分钟搞定,有的要弄二十分钟,协调者必须得有耐心处理这种“参差不齐”的部分完成状态。
如果大家还要抢夺公共资源,问题就更大了。当多个成员同时在改同一个代码库、数据库或文件时,很容易发生两个人改同一个文件或者做出互相冲突的修改。这就要求我们在任务分配时划好“楚河汉界”,并准备好冲突解决机制。
模式四:消息总线 (Message bus)
随着智能体数量增加,大家互动的方式越来越复杂,直接让他们面对面交流会变成一场灾难。这时候,消息总线 (Message bus) 就登场了:它提供了一个共享的通讯大厅,让智能体们通过“发布”和“订阅”来协调工作。
它是如何运作的
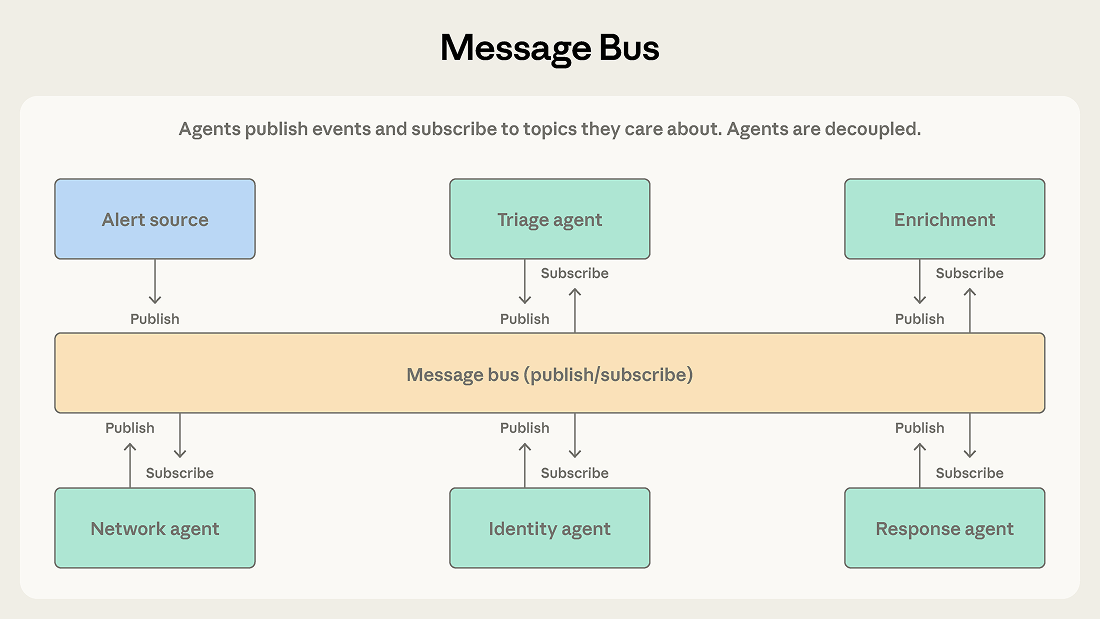
智能体只靠两个基本动作交流:发布 (Publish) 和订阅 (Subscribe)。智能体会订阅自己关心的“话题”,一个路由器 (Router) 会把相关的消息精准推给它们。(注:这就好比在一个大型公司群里,有人在群里发需求,相关部门的人看到了自动领走,你根本不需要知道具体是谁接了单。) 如果未来有了新功能的智能体加入,它们只要订阅相应的话题就能直接上岗,完全不需要改动现有的网络线路。
它在何时最好用
自动化安全运营系统是这个模式的完美舞台。各种渠道的警报像雪片一样飞来,一个“分诊智能体”负责评估严重程度和类型,把高危的网络警报推给“网络调查智能体”,把账号相关警报推给“身份分析智能体”。调查智能体在干活时,可能还会发布一条“需要更多背景”的需求,专门负责收集情报的智能体看到后就会去帮忙。最后,所有的发现都会流向“响应协调智能体”,由它来拍板怎么处理。
这种流水线简直就是为消息总线量身定制的:事件从上一个环节顺畅地流向下个环节;随着新型威胁出现,团队可以随时往里塞新的安保智能体;各个智能体的开发和部署也可以互不干扰。
当系统是一个由事件驱动的流水线(工作流是由突发事件决定的,而不是定死的顺序),而且你的智能体团队未来很可能会继续扩编时,选它。
它的局限性在哪
这种事件驱动的通讯过于灵活,导致排查问题非常困难。当一个警报像多米诺骨牌一样触发了五个智能体的连锁反应时,想搞清楚中间到底发生了什么,你必须查阅非常仔细的日志记录并进行关联对比。这可比跟着“调度者”一步步按顺序查 bug 痛苦多了。
路由器的分发准确性也至关重要。如果路由器把消息分错了类,或者干脆漏发了,系统就会陷入“静默崩溃”——它不报错,没死机,但就是什么也不干。基于大语言模型 (LLM) 的路由器虽然能在理解语义上更灵活,但也带来了 LLM 特有的失灵风险(比如理解偏差或幻觉)。
模式五:共享状态 (Shared state)
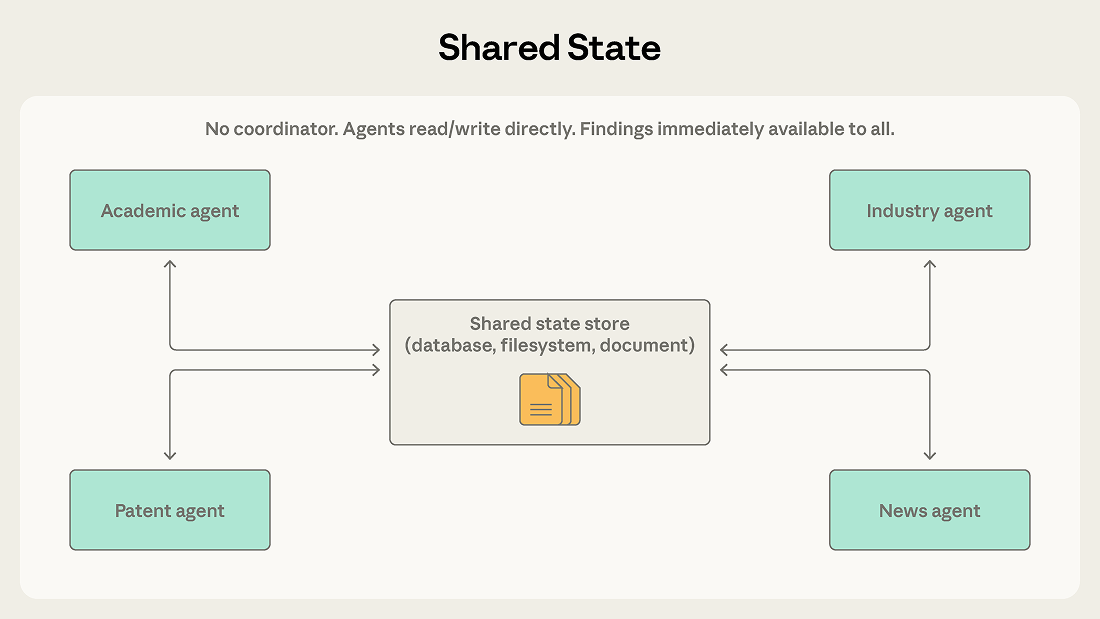
在前几种模式里,无论是调度者、协调者还是路由器,本质上都在充当信息流的“中间商”。而共享状态 (Shared state) 模式则彻底干掉了中间商,它让所有智能体共同面对一个持久化的存储区(比如数据库、文件系统或文档),大家可以直接从中读取信息、写入结果。
它是如何运作的
在这个模式下,没有所谓的“中心指挥官”。智能体们像在一个公共的大黑板前工作:他们看着黑板上有什么线索,拿走自己能处理的去干活,有了新发现再写回黑板上。通常,启动流程就是在黑板上写下一个大问题或放下一堆初始数据;当满足某个结束条件时,工作就停止——比如时间到了、大家很久没新发现了(收敛阈值),或者某个被专门指派的智能体站出来说“黑板上的答案已经足够好了”。
它在何时最好用
想象一个负责跨领域综合研究的系统。为了调查一个复杂问题,有的智能体负责翻学术论文,有的看行业报告,有的扒专利文件,还有的盯着新闻动态。每个人查到的东西都可能成为别人的关键线索。比如,看论文的智能体偶然发现了一位核心研究员,看行业报告的智能体立马就可以去深挖这家研究员背后的公司。
在共享状态下,所有的发现都直接上黑板。看行业的智能体立马就能看到看论文智能体的新发现,根本不用等协调者来回传话。大家互相踩着对方的肩膀往上爬,这块共享黑板也就渐渐变成了一个不断进化演进的知识库。
这种模式还有一个好处:消除了单点故障。即便某个智能体宕机了,其他人依然能对着黑板继续读写。但在调度模式或消息总线模式里,一旦指挥官或路由器罢工,整个系统就全瘫痪了。
它的局限性在哪
失去了统一指挥,智能体很容易会重复造轮子,或者南辕北辙。比如两个智能体可能不约而同地去调查了同一条线索。系统的最终行为是大家碰撞出来的,而不是从上往下设计好的,这也让结果变得难以预测。
最致命的故障模式是陷入 “反应式死循环” (Reactive loops)。比如,智能体 A 写下了一个发现,智能体 B 看到后写了一句补充,A 看到补充后又回了一句…… 整个系统就像两个机器人在无限套娃聊天,疯狂燃烧昂贵的算力 (Token) 却无法得出结论。针对重复工作和并发写入,工程师们有成熟的解决办法(比如加锁、版本控制、分区);但这这种“无限套娃”是一个行为模式问题,你必须在系统设计之初就设定好“一票否决”的终止条件:比如只给固定的时间预算,或者一旦连续几轮都没有新发现就强制停止,或者指派一个“裁判”智能体随时判定答案是否已经圆满。(注:如果忽略了停止机制的设计,系统要么会无限循环到破产,要么会因为某个智能体的大脑(上下文窗口)被塞满而死机。)
如何在不同模式间选择与进化
选哪种模式,取决于你对系统的几个核心结构问题的判断。在我们之前的文章中,我们提倡围绕“上下文”来拆解工作(Context-centric decomposition),即按照每个智能体“需要知道哪些背景信息”来分工,而不是按“它干什么类型的活”来分工。这个原则在这里同样适用。这五种模式最大的区别,就在于它们如何划分上下文的边界,以及如何管理信息的流动。
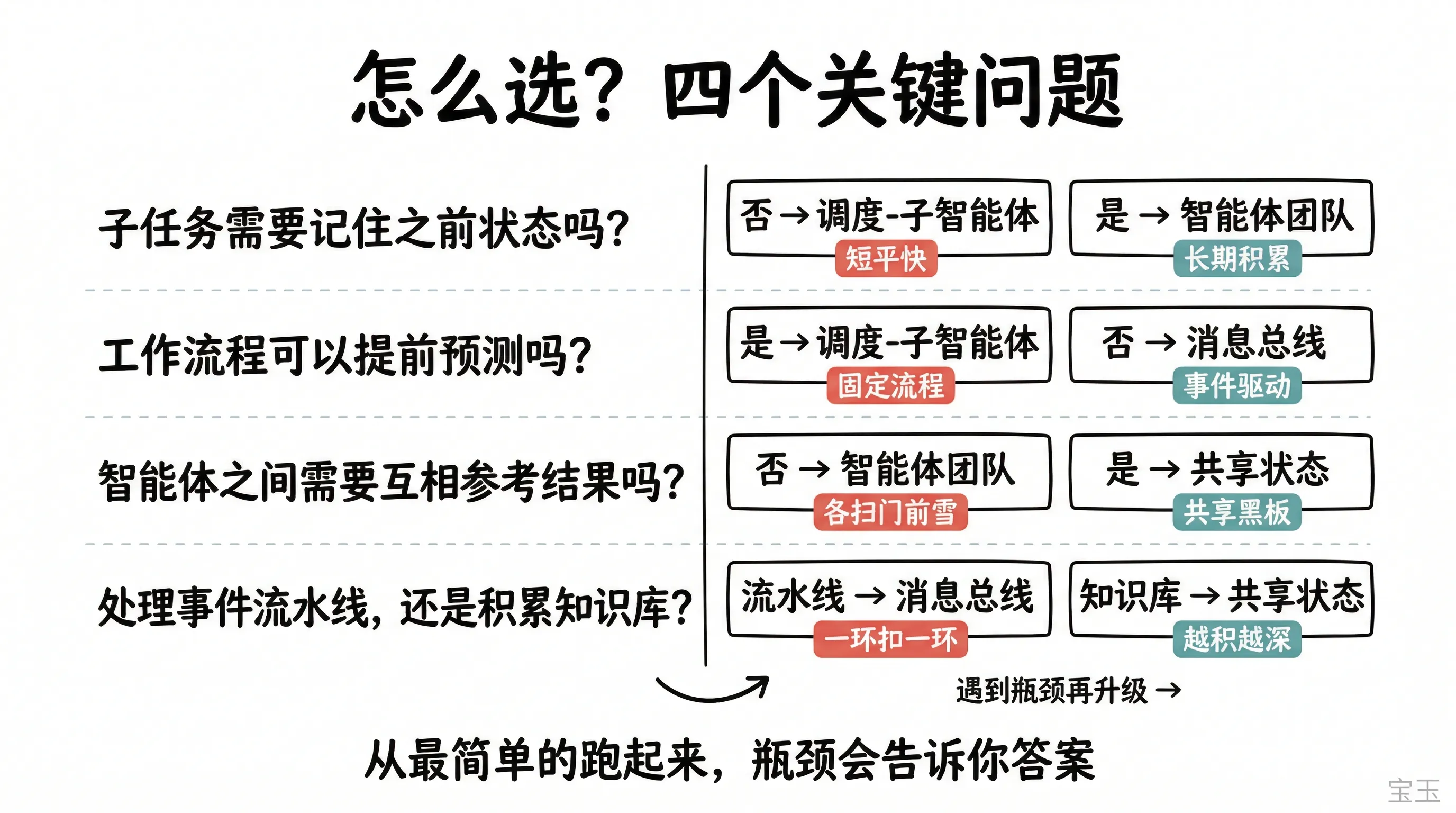
调度 - 子智能体 vs. 智能体团队
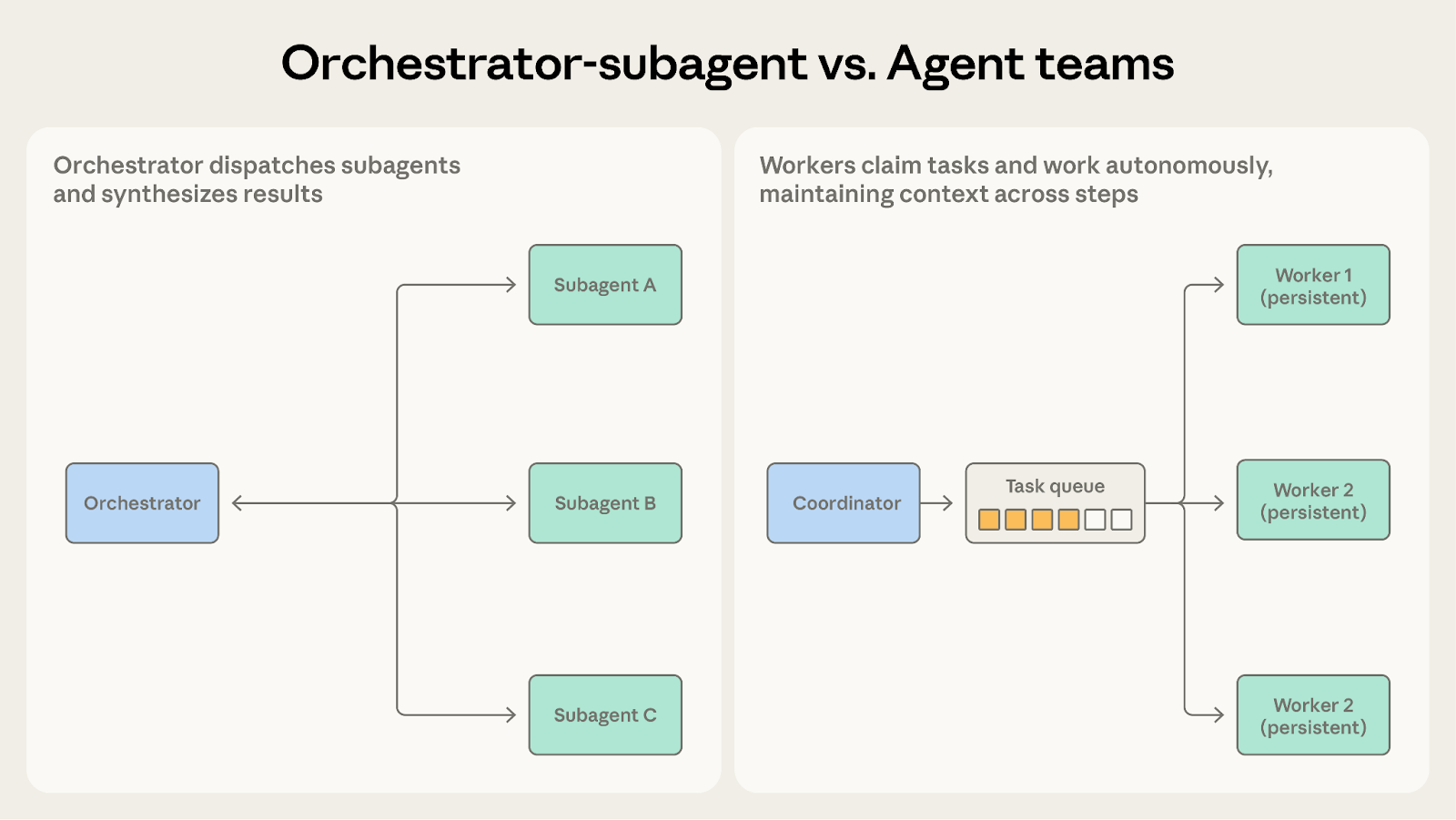
两者都有一个“分配工作”的协调者。怎么选?问自己:干活的智能体需要长时间保留记忆(上下文)吗?
- 选调度 - 子智能体:如果子任务短平快,目标集中,且输出明确。代码审查系统就适用,因为每次检查都是单次的:跑分析、出报告,直接交差。子智能体不需要在多次任务间保留记忆。
- 选智能体团队:如果子任务需要跨越多步、长时间处理才能出成效。代码库迁移适用这个,因为成员们需要长期对付同一个服务模块,慢慢摸透它的依赖关系、测试规律和部署配置。这种积累下来的背景知识,是“用完即走”的调度模式给不了的。
当子智能体需要在多次被唤醒之间记住以前的状态时,智能体团队是更好的选择。
调度 - 子智能体 vs. 消息总线
两者都能处理多步工作流。怎么选?问自己:你的工作流程是可以提前预测的吗?
- 选调度 - 子智能体:如果步骤早就定好了。就像代码审查系统,永远是那三板斧:接收提交请求、跑检查、汇总结果。
- 选消息总线:如果工作流是由突发事件触发的,而且随时可能改变方向。安全运营系统永远猜不到下一秒会来什么警报,或者需要开展什么调查。它甚至需要随时容纳新类型的警报。消息总线通过把事件推给能干活的智能体来适应这种变数,而不是死守着预设的剧本。
如果为了应付越来越多的特殊情况,你的“调度者”脑子里的“If-Else”判断语句越堆越多,那么是时候换成消息总线,让分发机制变得更加清晰和容易扩展了。
智能体团队 vs. 共享状态
两者里的智能体都是自主干活的。怎么选?问自己:智能体之间需要互相对答案、抄作业吗?
- 选智能体团队:如果大家各人自扫门前雪,互不干涉。代码库迁移中,每个人负责自己的服务,最后统一合并就行。
- 选共享状态:如果这是一场需要高度协作的任务,且线索需要实时流转。综合研究系统就很合适,看论文的智能体只要有新发现,看行业的智能体立马就能用上。
一旦团队成员们不再仅仅是交差时汇总结果,而是需要在干活途中频繁互通有无,那赶紧换成共享状态模式吧,它会让交流顺畅得多。
消息总线 vs. 共享状态
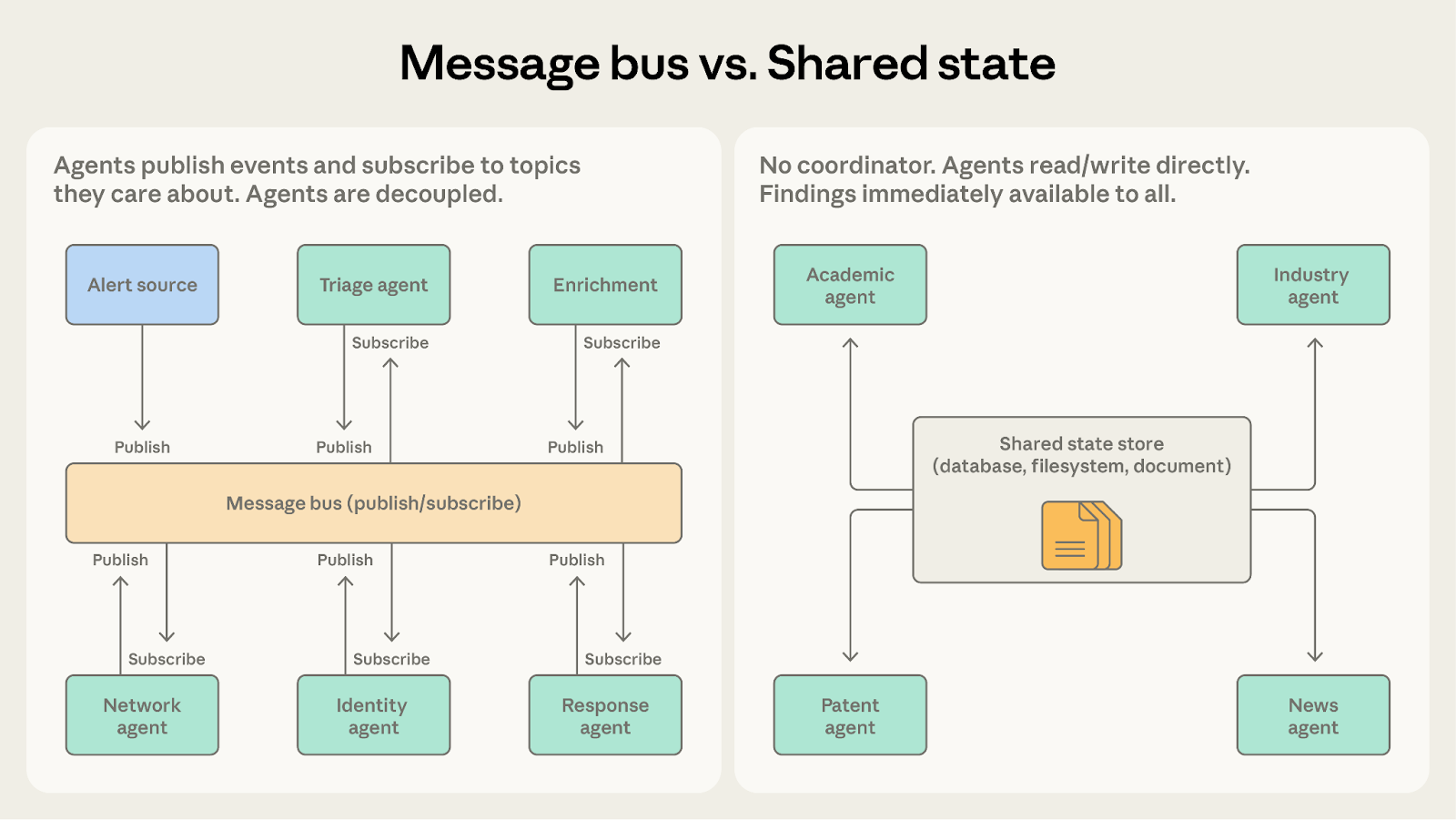
两者都擅长处理复杂的多智能体协作。怎么选?问自己:任务是像流水线一样一个个解决事件,还是为了慢慢攒出一个知识库?
- 选消息总线:如果智能体是对流水线上的事件做出反应。安全系统就是一环扣一环,处理完上一步才触发下一步。这个模式对“精准派活”非常在行。
- 选共享状态:如果智能体是要基于日积月累的线索持续深入。综合研究系统是在不断汇聚知识。智能体们会反复回到黑板前,看看别人发现了什么,然后调整自己的调查方向。
记住,消息总线里依然有个“路由器”在中心掌控全局决定谁接活。而共享状态是彻头彻尾的去中心化。如果你非常在意消除“单点故障”,共享状态能给你最大的安全感。
另外,如果你的消息总线系统里,大家发布消息主要只是为了“共享情报”而不是为了“触发别人的动作”,那说明你选错了,这活儿更适合共享状态模式。
新手指南
在真实的商业环境(生产环境)中,我们往往会混搭使用这些模式。一种常见的组合是:大方向的工作流用调度 - 子智能体,而在某个需要大量协作的子任务里套用共享状态。还有的系统会用消息总线来分发事件,而在处理每类事件的末端挂上一个个智能体团队。这些模式本质上是积木,并非水火不容。
下表总结了各种模式的适用场景:
| 适用场景 | 推荐模式 |
|---|---|
| 看重输出质量,且有明确的评估标准 | 生成 - 验证者 (Generator-Verifier) |
| 任务拆解清晰,子任务边界分明且短平快 | 调度 - 子智能体 (Orchestrator-Subagent) |
| 工作量可并行,且子任务独立、需要长时间运行 | 智能体团队 (Agent Teams) |
| 事件驱动的流水线,智能体生态系统还在不断增长 | 消息总线 (Message Bus) |
| 协作式研究,智能体之间需要频繁共享新发现 | 共享状态 (Shared State) |
| 绝对不允许出现单点故障导致系统瘫痪 | 共享状态 (Shared State) |
对于绝大多数刚刚起步的需求,我们强烈建议从“调度 - 子智能体 (Orchestrator-subagent)”开始。 它能以极低的协调成本搞定最广泛的问题。先用它跑起来,观察系统在哪里卡了脖子,然后再根据具体痛点进化到其他模式。
在接下来的文章中,我们将结合生产级别的实际案例,深入探讨每种模式的具体落地做法。如果你想回顾“我们到底什么时候值得投入多智能体系统”,请参阅:《构建多智能体系统:何时及如何使用它们》。
致谢
本文由 Cara Phillips 撰写,Eugene Yang, Jiri De Jonghe, Samuel Weller 以及 Erik Schluntz 亦有贡献。